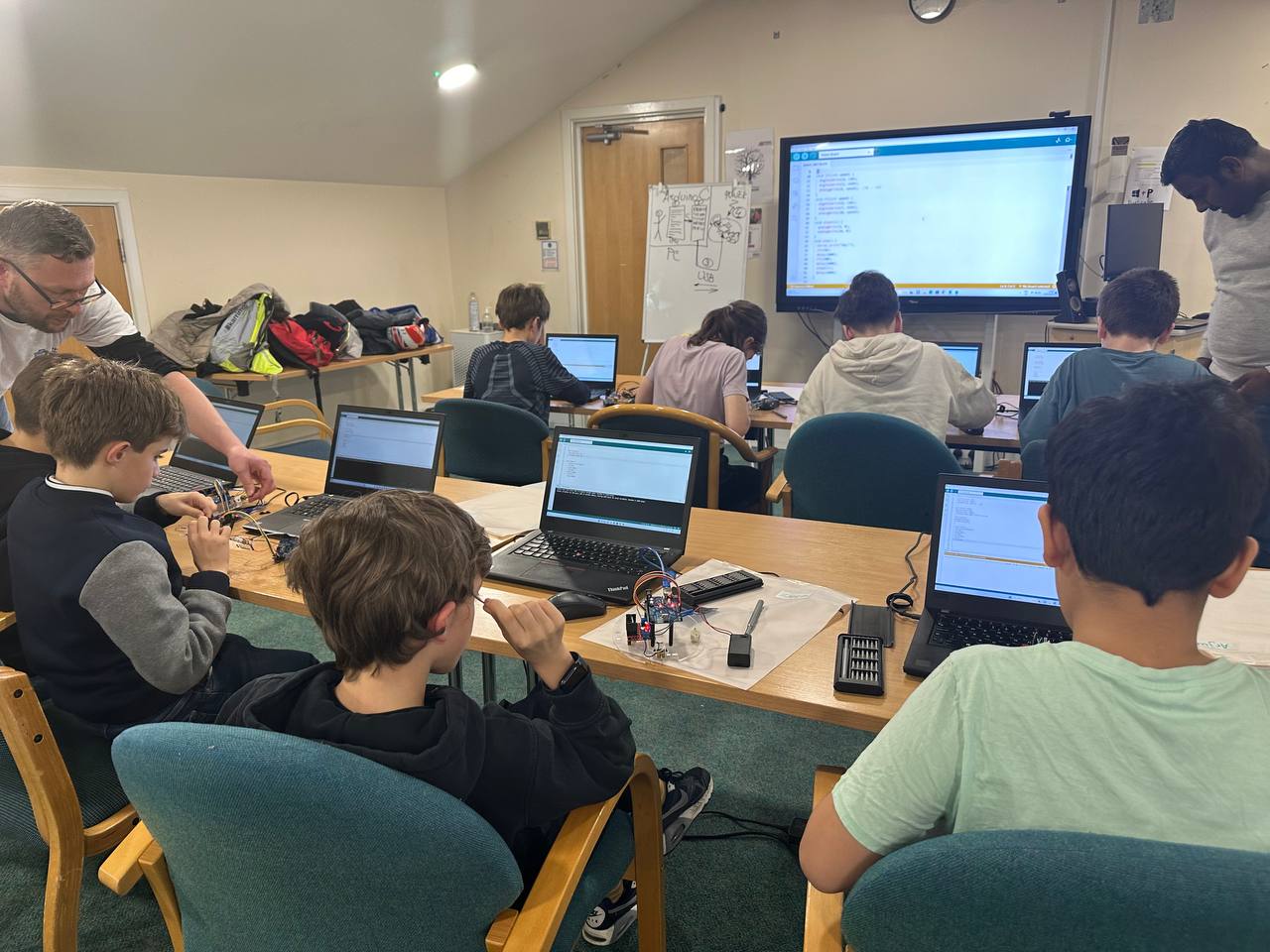
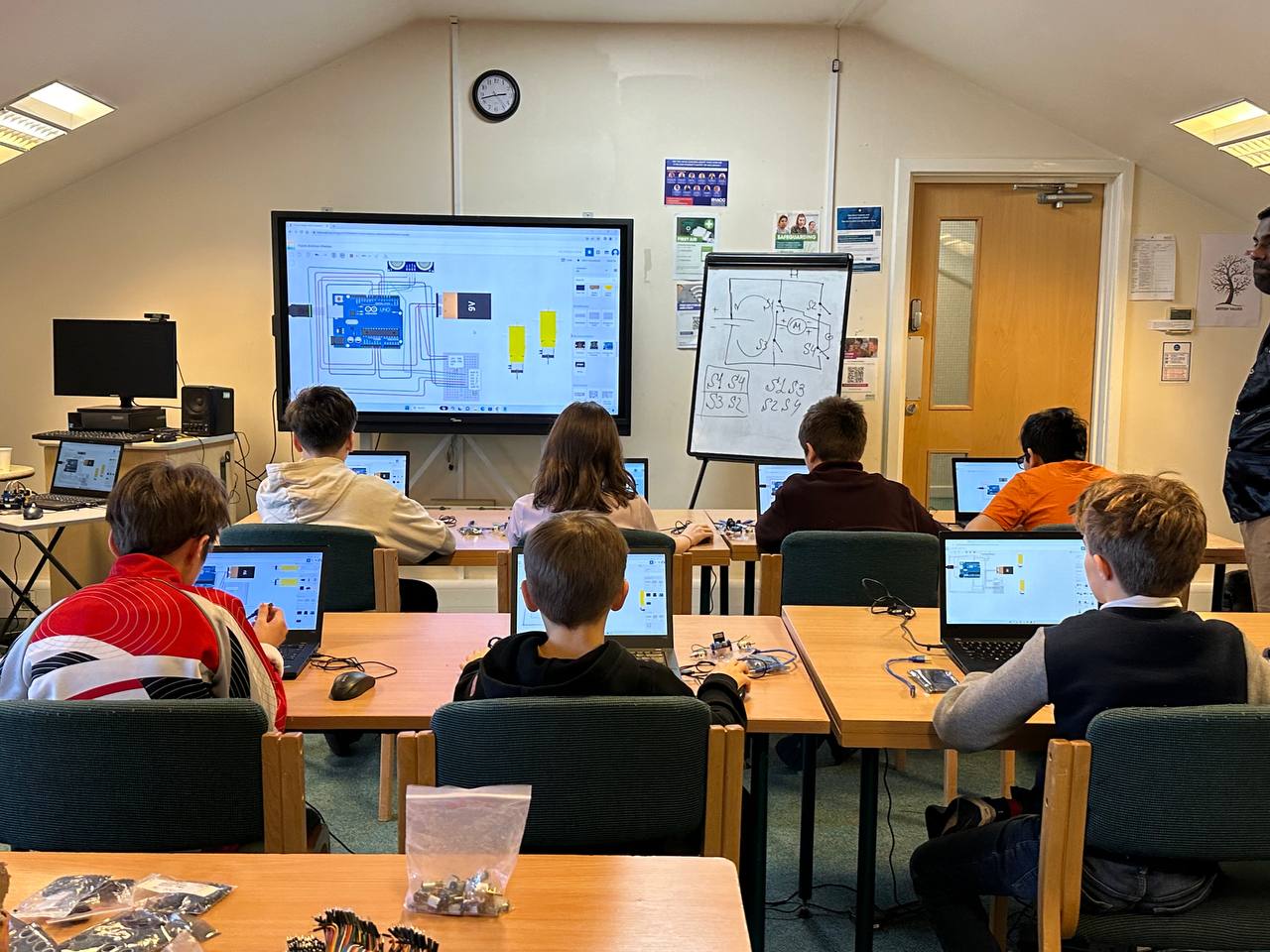
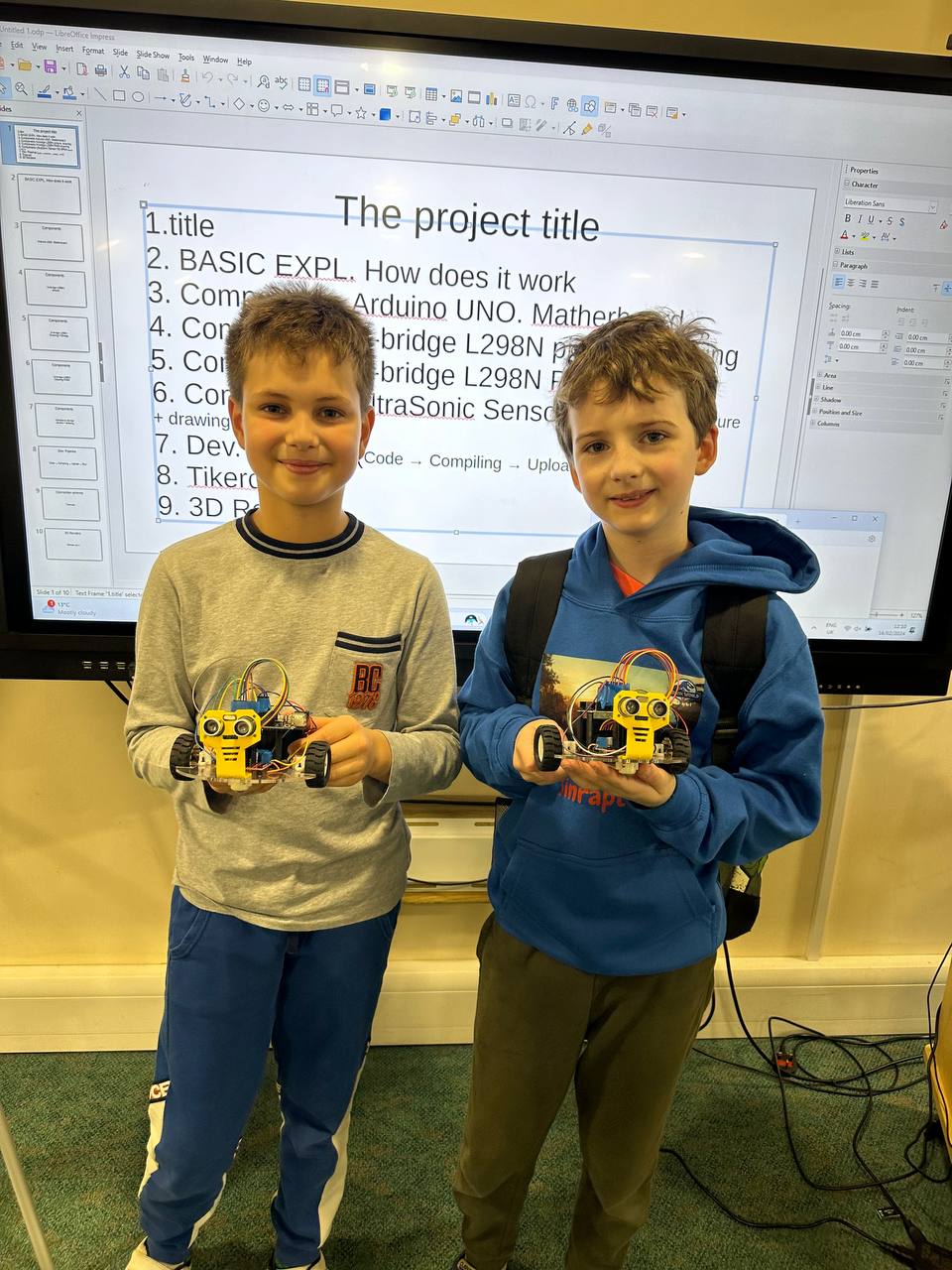
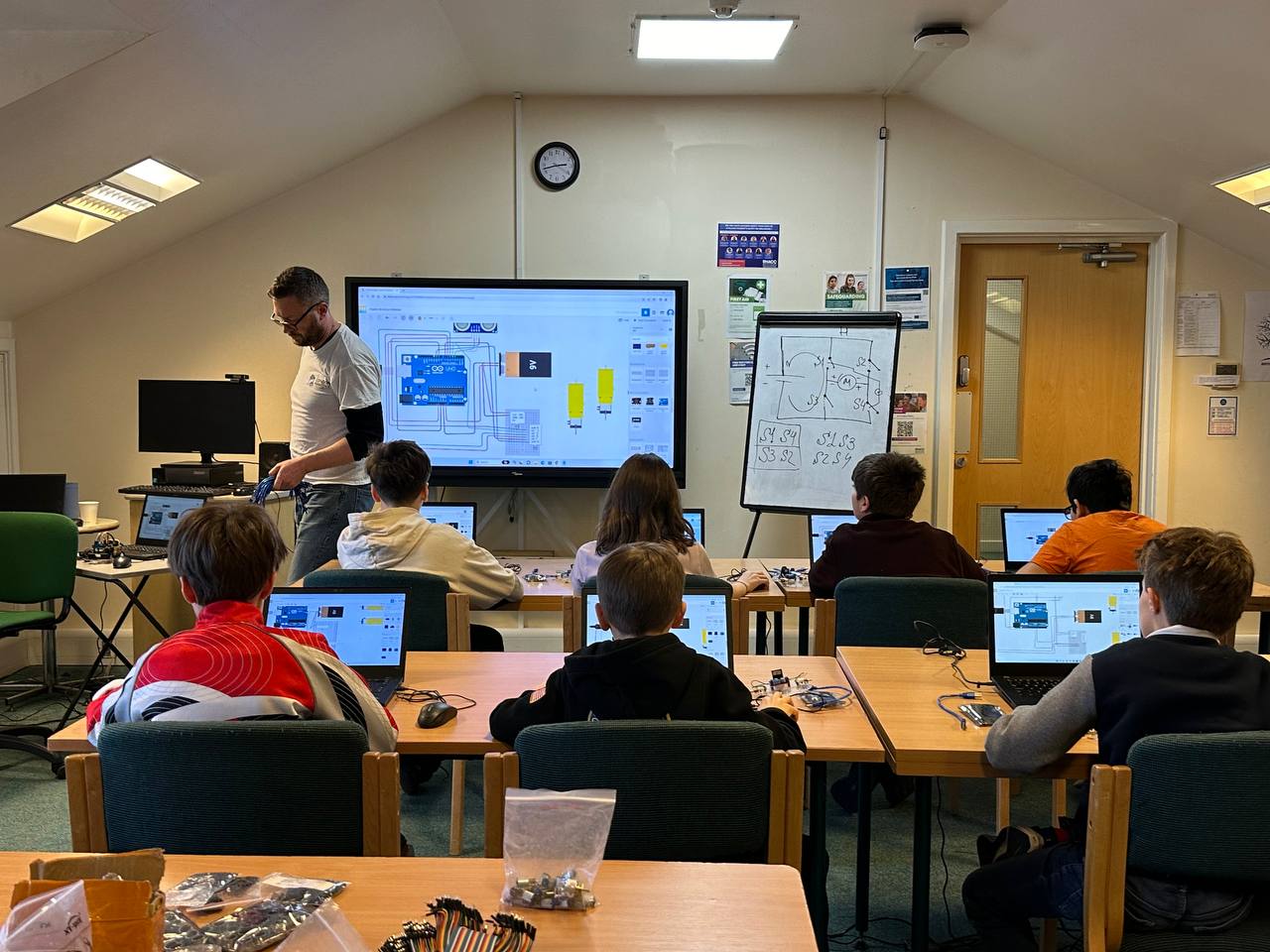
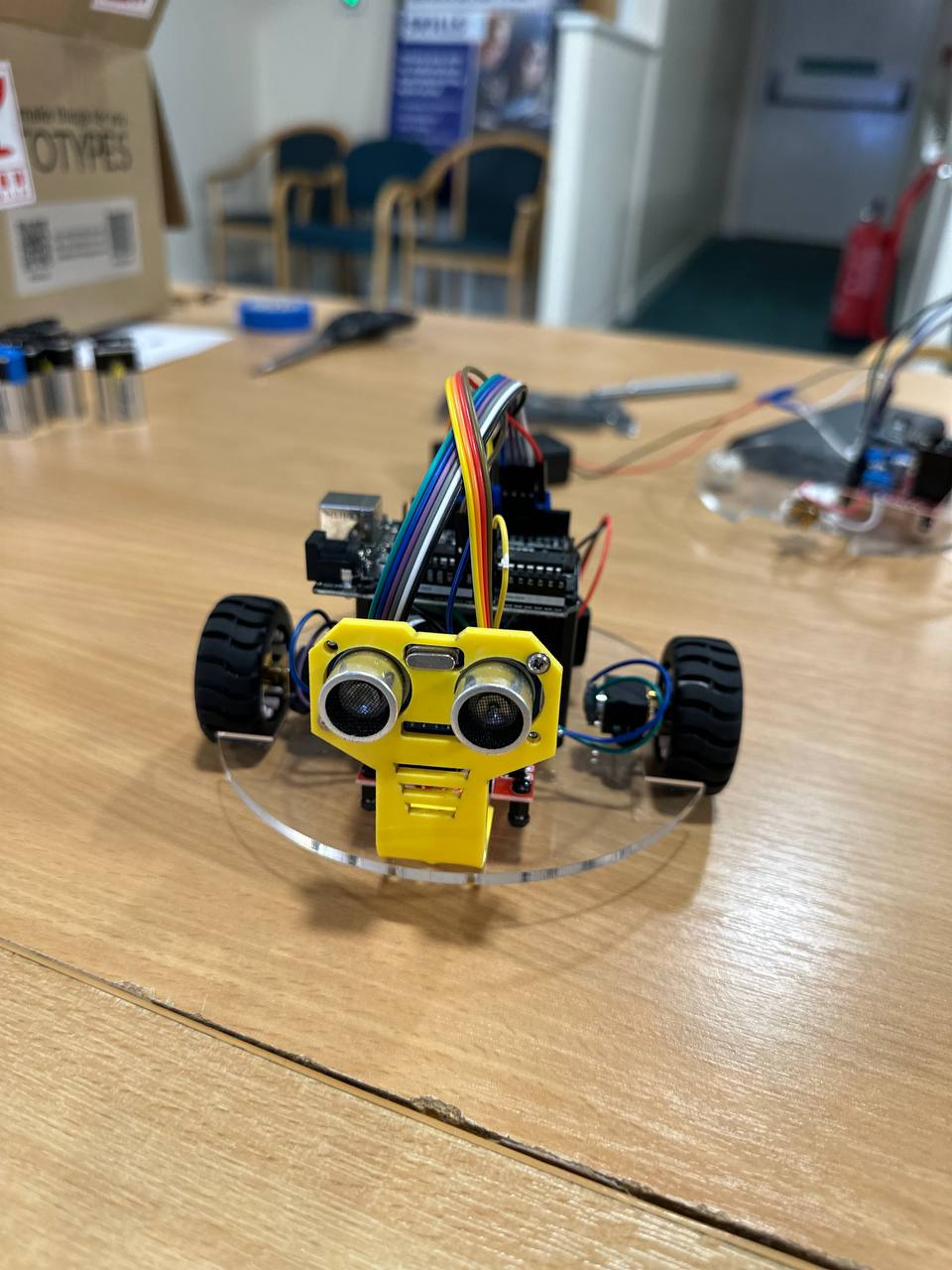
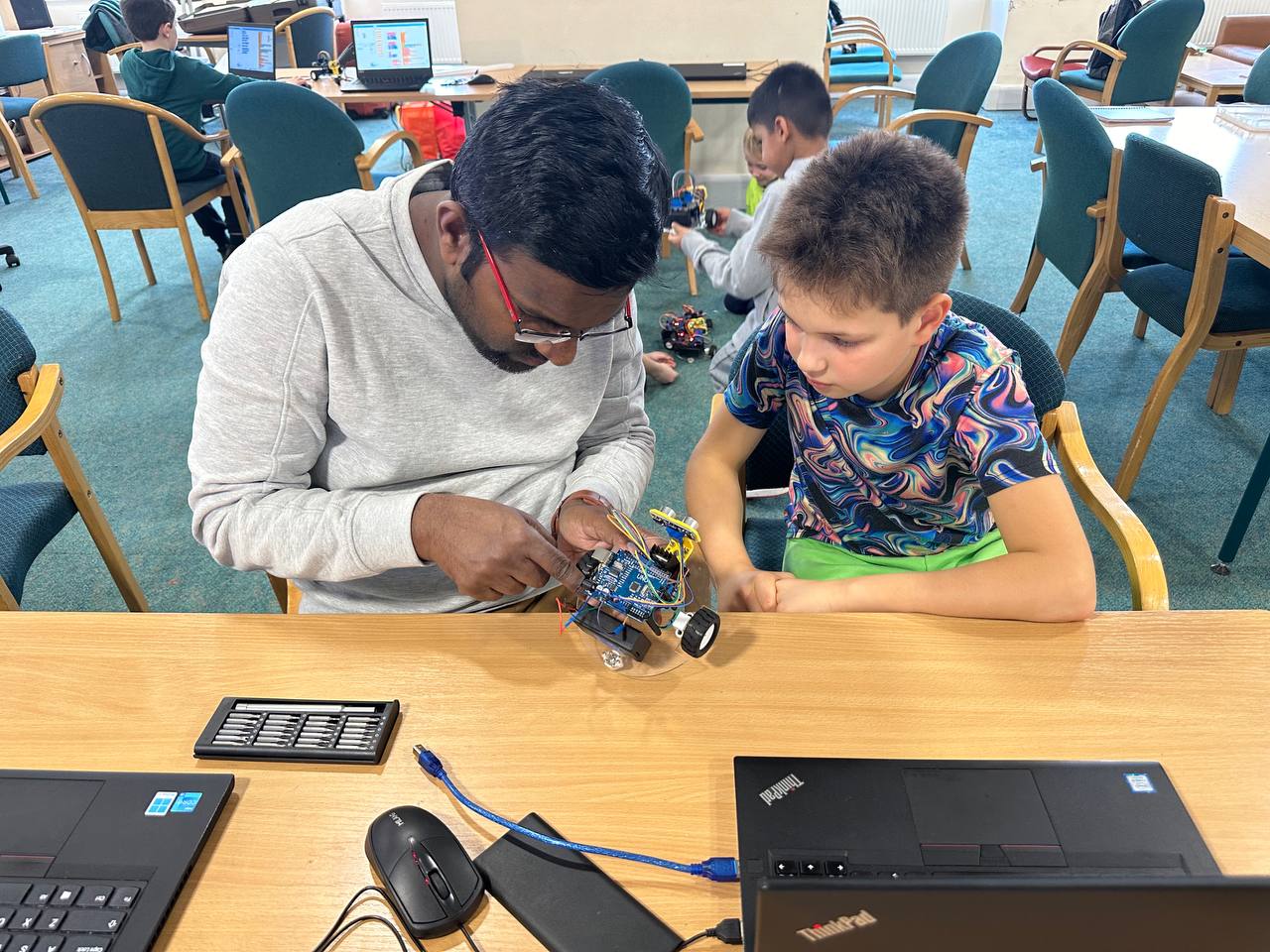
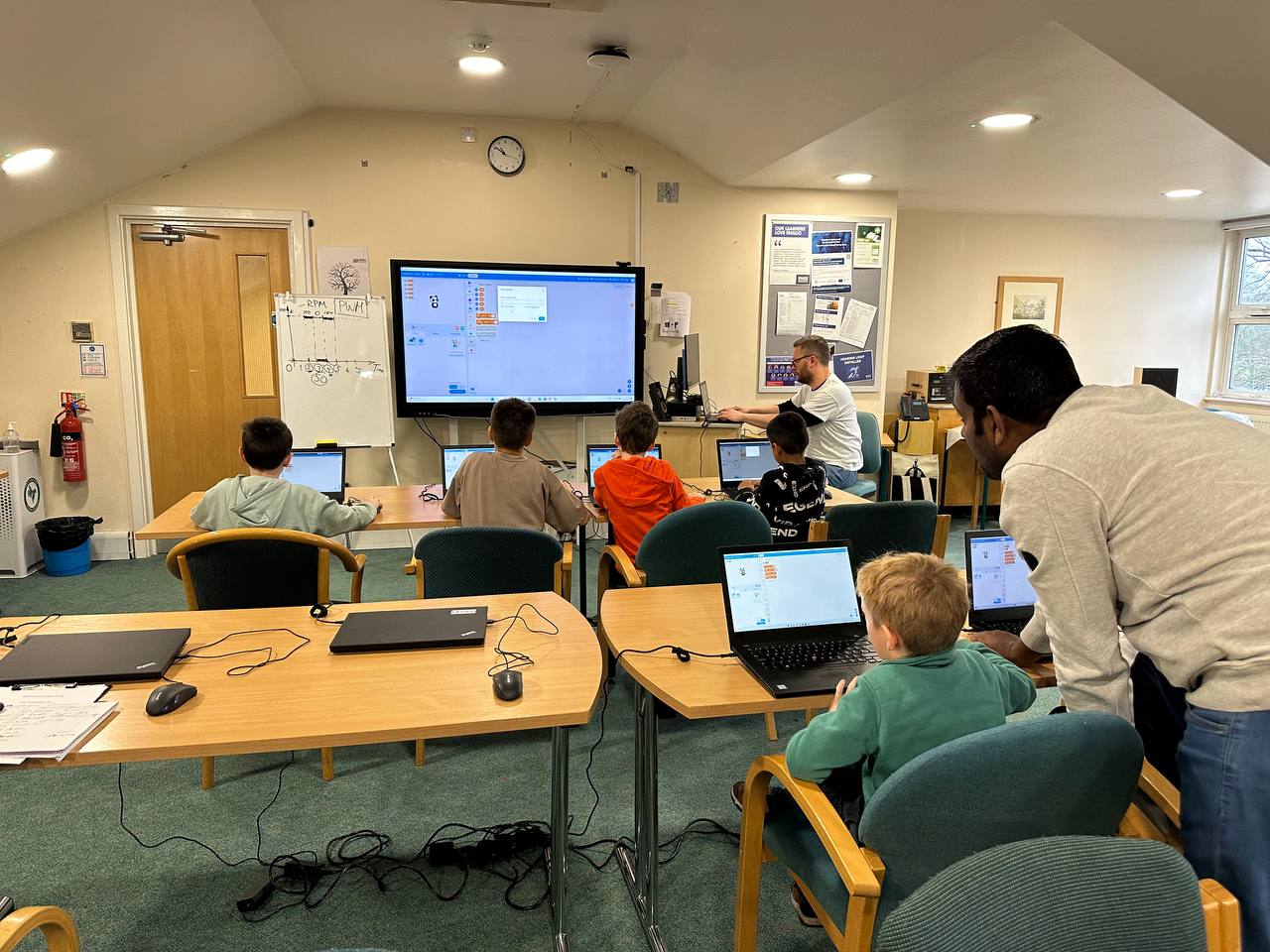
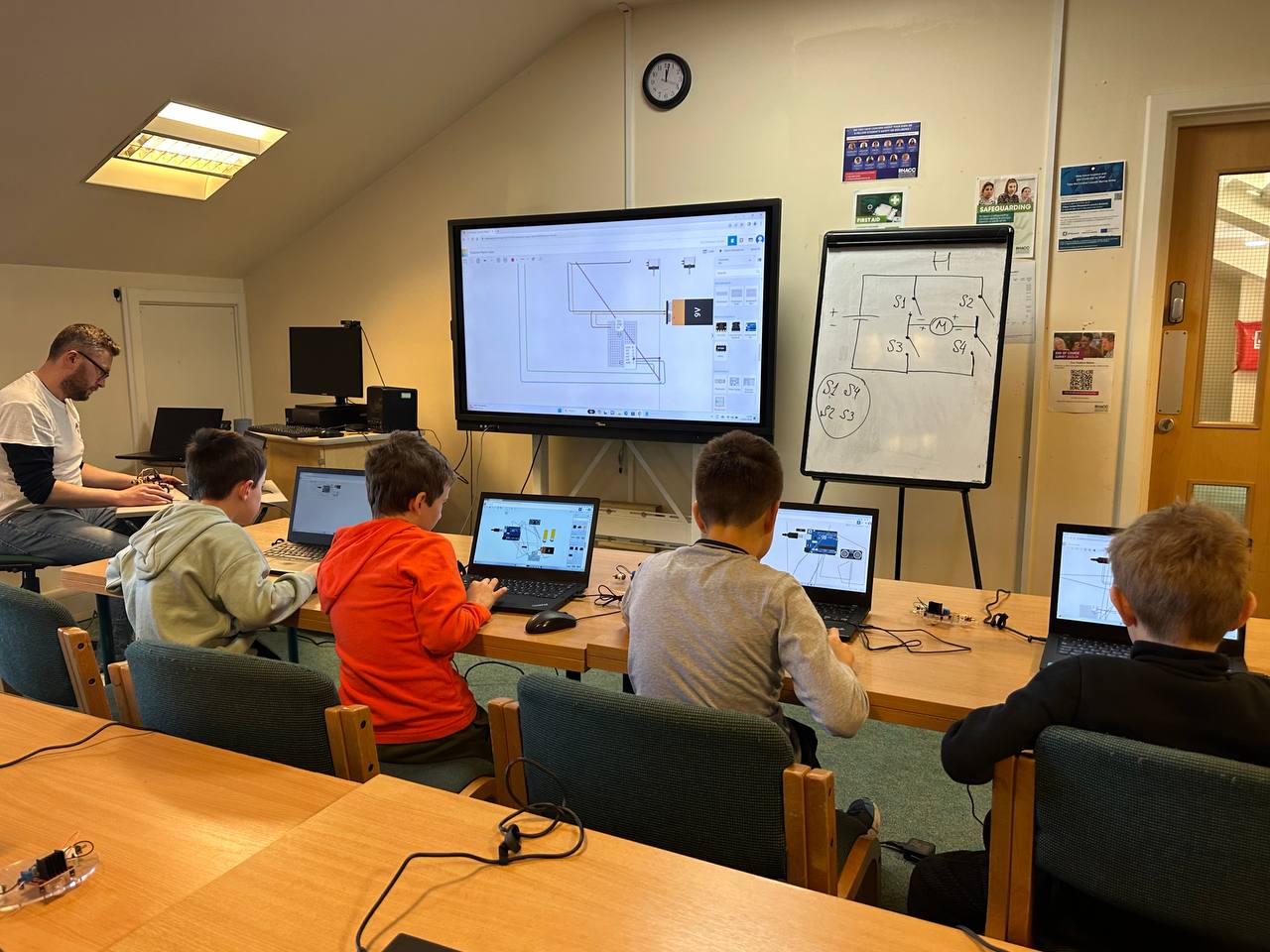
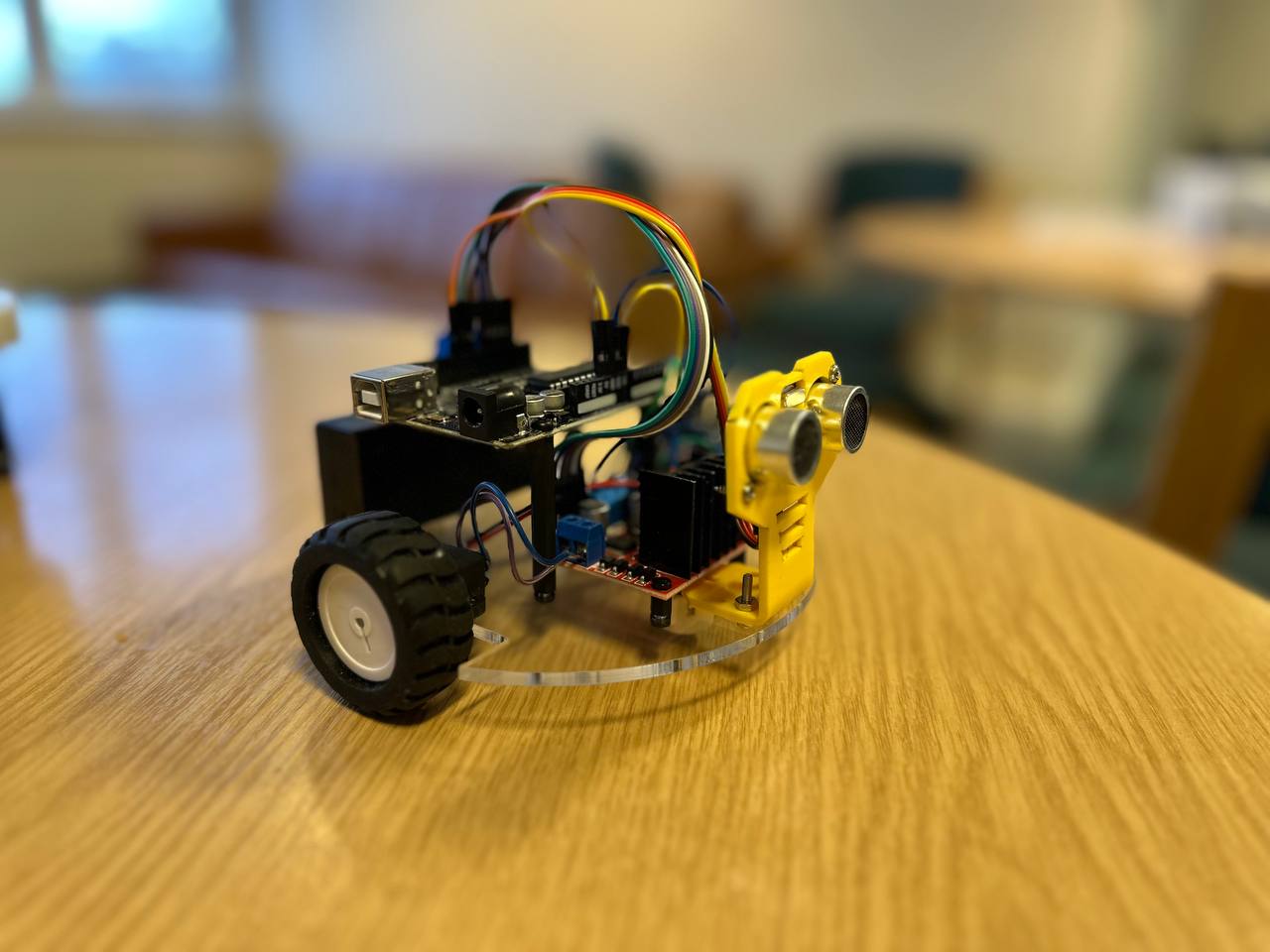
The robotic vehicle with the front obstacle detector sensor. Pupils built the robotic car based on Arduino microchip and the UltraSonic sensor in Febrary'24. They used the Arduino IDE editor (Arduino C programming language) or MBlcok depending on the age group to make a program where the car performed the turns with respect to the obstacles in front and control the speed according to the environmental objects.