Hexapod robot. Advanced classes
VAT inc
Available for: 11+ years old
5 days, from 20 Jul'26 - 24 Jul’26
From 12.30 until 15.30
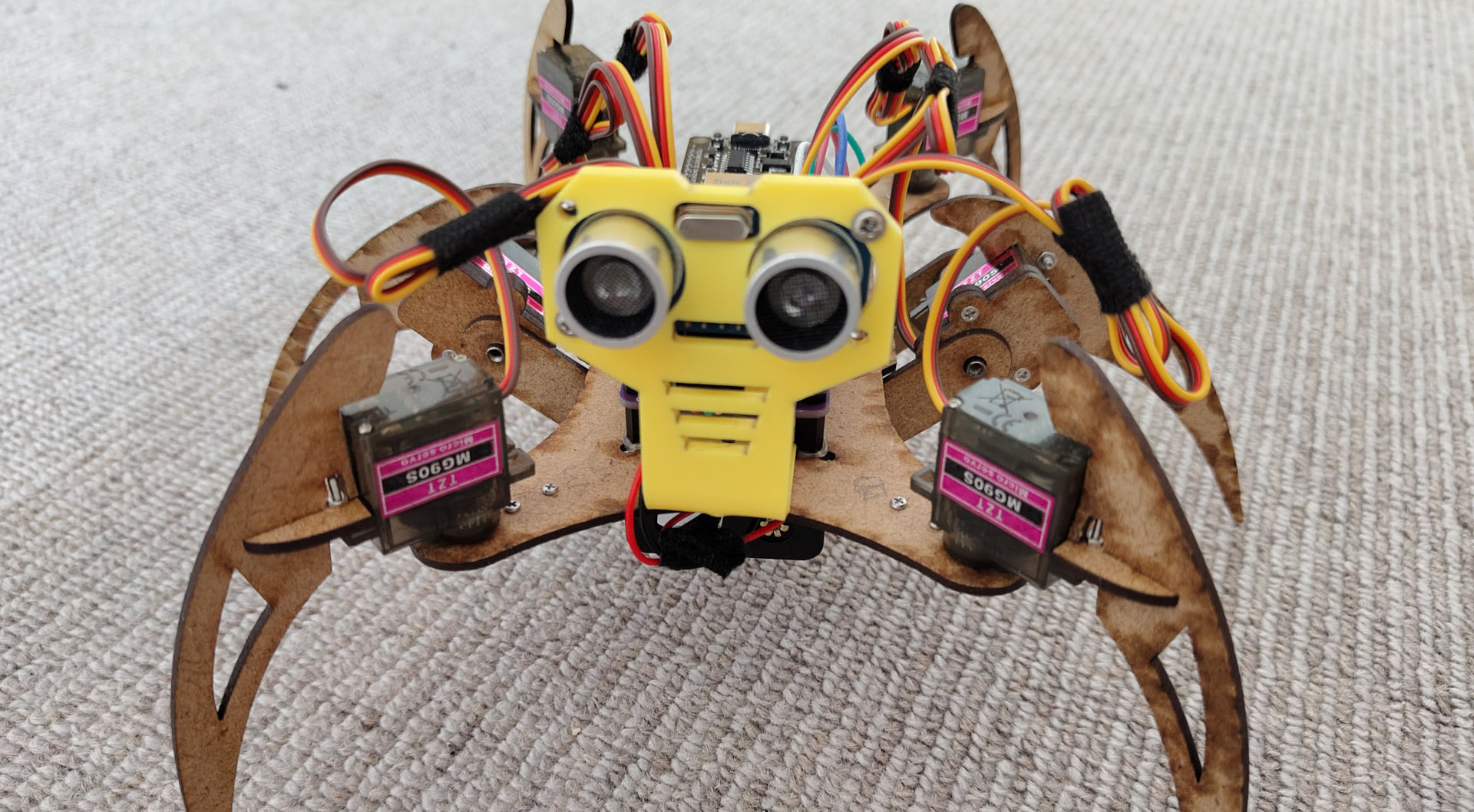
In this hands-on robotics project, pupils build and program their own autonomous walking hexapod robot using an ESP32 microcontroller and Arduino C programming. The robot uses multiple servo motors and an ultrasonic distance sensor to create a walking machine capable of moving forward, reversing, and reacting to nearby objects. By the end of the camp, every participant takes home a fully working robot that they assembled, wired, programmed, and tested themselves.
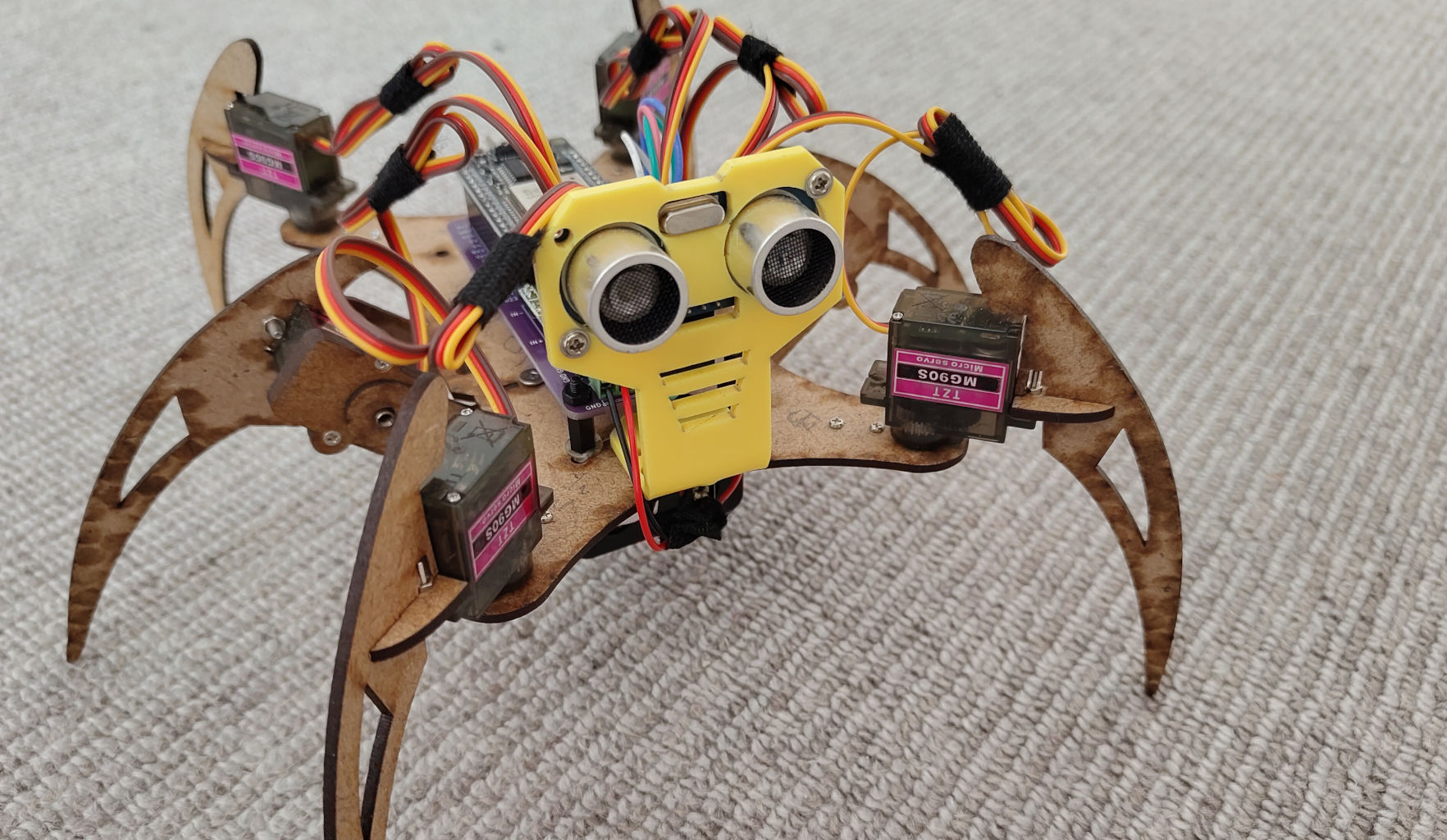
The project introduces pupils to real robotics engineering concepts used in autonomous machines and research robots. Pupils learn how servo motors generate precise mechanical movement, how walking gaits are created through coordinated motion, and how sensors allow robots to respond to their surroundings. The robot uses paired MG90S servo motors to control body tilt and leg movement, demonstrating how complex movement can be achieved through carefully timed motion sequences.
Before programming begins, pupils design the robot’s wiring diagram in Fritzing to understand how the electronic system is connected together. They assemble the ESP32 controller, servo motors, ultrasonic sensor, power regulation modules, and lithium-ion battery system while learning how power distribution and signal control work in embedded robotics systems.
Unlike beginner block-based projects, pupils program the robot directly in Arduino C using the Arduino IDE. They write real embedded code to control servo movement, generate smooth transitions between positions, and coordinate the walking gait. Through programming exercises, pupils learn how variables, functions, timing, loops, and sensor input are used to create autonomous robotic behaviour.
As pupils develop the robot’s walking algorithm, they experiment with movement speed, balance, timing, and gait stability. They learn how changing servo positions and movement timing affects the robot’s ability to walk smoothly and maintain stability. Using the ultrasonic sensor, pupils program the robot to react dynamically to nearby objects and follow a user’s hand by moving forward, stopping, or reversing depending on measured distance.
The project combines electronics, mechanics, embedded systems, sensor integration, and software engineering into one complete robotics platform. Pupils gain practical experience debugging real hardware, tuning mechanical movement, analysing sensor behaviour, and improving robot performance through iterative testing and programming.
Rather than simply assembling a kit, pupils experience the full engineering workflow behind a real robotic system: wiring hardware, writing embedded software, testing movement, diagnosing problems, and refining the final behaviour of the robot.
At the end of the camp, each pupil takes their autonomous walking hexapod robot home to continue experimenting with Arduino programming, developing new behaviours, improving the walking gait, and extending the robot with additional sensors and features.
That is a take-home project!
The Camp Dates and Time
5 days, from 20 Jul'26 - 24 Jul’26
Start at 12.30 until 15.30
Age: from 11 years old (to 17)
Location
Richmond and Hillcroft Adult Community College.
Parkshot, Richmond TW9 2RE
The closest parking at the Old Deer Park (Extension).
Learning outcomes
- Understand how walking robots generate movement
Pupils learn how coordinated servo motion and body balance create stable walking behaviour in a multi-legged robot.
- Learn how servo motors are controlled in embedded systems
Pupils explore how PWM signals and timed position updates allow servo motors to produce accurate mechanical movement.
- Build and wire a complete robotics platform
Pupils connect servo motors, sensors, power systems, and a microcontroller using real electronic schematics and wiring diagrams.
- Develop programming skills in Arduino C
Pupils write and modify real embedded C code using variables, functions, loops, timing logic, and sensor input handling.
- Understand robotic gait sequencing
Pupils learn how movement timing, weight transfer, and coordinated motor control affect robot stability and walking performance.
- Explore autonomous robot behaviour
Using an ultrasonic distance sensor, pupils create programs that allow the robot to react automatically to nearby objects and user interaction.
- Learn how software controls physical hardware
Pupils see how code running on a microcontroller directly controls motors, sensors, and mechanical movement in a real robot.
- Develop debugging and engineering problem-solving skills
Pupils test their robots, diagnose movement and wiring issues, and refine both software and mechanical setup through experimentation.
- Gain practical experience with embedded robotics systems
By building and programming a complete walking robot, pupils gain hands-on experience with electronics, mechanics, sensors, power systems, and real-time embedded programming.
There are some requirements exist for the course:
1. You must be confident in using a computer, keyboard and mouse. At the good user level.
2. Know how we save files on a computer, what a file and folders are, etc.
3. Be able to switch between windows in the operating system. Use the keys’ shortcuts.
4. No previous experience with 3D modeling is required.
5. No previous experience in Robotics is required.
6. You want to program robots and are not afraid to struggle with the difficulties of learning them.
7. Minimum previous experience with text-based programming is required. Ideally, you are able to make a program that performs basic maths operations with numbers. The programming language itself is not important.